|
Curves and Surfaces
 The reconstruction of surfaces from apparent contours
The reconstruction of surfaces from apparent contours
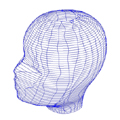
In this project we aim to recover the shape of arbitrary surfaces
from the apparent contours (or outlines) visible from arbitrary views.
A key contribution is the introduction of the epipolar
parametrization which exploits the epipolar geometry
(geometry of viewpoints) to induce a spatio-temporal
parametrization of the image curves and surfaces. This
generalizes the epipolar geometry of points to curves and surfaces,
and allows the recovery of shape under perspective projection and
arbitrary camera motion.
 Further Information
Further Information
 The analysis of the degeneracies of the epipolar parametrization
The analysis of the degeneracies of the epipolar parametrization
Singular apparent contours or cusps occur at isolated points,
seen as an abrupt contour ending in the outline of an
opaque surface. The epipolar parametrization cannot be used to
recover surface geometry at these points. In this project,
the locus of cusps under viewer motion is exploited
to recover the geometry in the vicinity of the cusps.
The other case of degeneracy is used to develop an algorithm
to recover viewer motion.
 Recovery of camera motion from outlines
Recovery of camera motion from outlines
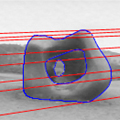
It is generally believed that the outlines of a curved surface
cannot be used to recover the motion since they are
projections of curves which slip over the surface under viewer
motion. In this project, the envelope of consecutive contour
generators is shown to define special (frontier) points and
these points are used to recover the epipolar geometry from
image curves.
 Circular motion
Circular motion
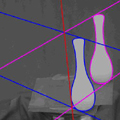
In this project, a particularly simple and elegant solution is
found for a special type of motion in which an object is placed
on a turntable which is rotated in front of a stationary camera.
A novel solution is introduced which exploits the
symmetry in the envelope of outlines swept out by the rotating
surface. This technique uses a single curve tracked over the
image sequence and has been successfully used to recover the
shape of an arbitrary object from an uncalibrated camera.
Further Information
 Quasi-invariant parametrizations and matching of curves
Quasi-invariant parametrizations and matching of curves
In this project we aim to develop a robust algorithm
for curves mathcing. B-splines can be fitted automatically
to image edge data and used to group fragments of curves which
are projections of bilateral symmetry in the scene. Quasi-invariant
parametrizations of image curves are developed to help in the
matching of curves. These reduce the order of derivatives required
to compute the geometric invariants of curves from fifth to
second-order making these less sensitive to image noise and occlusion.
Further Information
|